GPS — спутниковая система навигации, обеспечивающая измерение расстояния, времени и определяющая местоположениe. Позволяет в любом месте Земли (не включая приполярные области), почти при любой погоде, а также в космическом пространстве вблизи планеты определить местоположение и скорость объектов. Система разработана, реализована и эксплуатируется Министерством обороны США.

Содержание
- Краткая характеристика GPS
- Определение координат потребителя
- Местоопределение по расстояниям до спутников
- Измерение расстояния до спутника
- Обеспечение совершенной временной привязки
- Определение положения спутника в космическом пространстве.
- Ионосферные и атмосферные задержки сигналов.
- Многолучевость.
- Геометрический фактор уменьшения точности.
- Результирующая точность GPS.
- Вывод:
- Глобальная навигационная спутниковая система ГЛОНАСС
- История развития ГЛОНАСС
- Структура ГЛОНАСС
- Международная деятельность
- Повышение точности навигации
- Применение ГЛОНАСС
- Технические характеристики
- Спутниковая группировка
- Типы космических аппаратов
- Навигационные радиосигналы
- Система координат и шкала времени
- Наземный комплекс управления
- Интерфейсный контрольный документ
- Официальный сайт
Краткая характеристика GPS
Спутниковая навигационная система Министерства Обороны США — GPS, называется также NAVSTAR. Система состоит из 24 навигационных искусственных спутников Земли (НИСЗ), наземного командно-измерительного комплекса и аппаратуры потребителей. Она является глобальной, всепогодной, навигационной системой, обеспечивающей определение координат объектов с высокой точностью в трехмерном околоземном пространстве. Спутники GPS помещены на шести средневысоких орбитах (высота 20183 км) и имеют период обращения 12 часов Плоскости орбит расположены через 60° и наклонены к экватору под углом 55°. На каждой орбите находится 4 спутника. 18 спутников — это минимальное количество для обеспечения видимости в каждой точке Земля не менее 4-х НИСЗ.
Основной принцип использования системы — определение местоположения путём измерения расстояний до объекта от точек с известными координатами — спутников. Расстояние вычисляется по времени задержки распространения сигнала от посылки его спутником до приёма антенной GPS-приёмника. То есть, для определения трёхмерных координат GPS-приёмнику нужно знать расстояние до трёх спутников и время GPS системы. Таким образом, для определения координат и высоты приёмника используются сигналы как минимум с четырёх спутников.
Система предназначена для обеспечения навигации воздушных и морских судов и определения времени с высокой точностью. Она может применяться в режиме двухмерной навигации – 2D определение навигационных параметров объектов на поверхности Земли) и в трехмерном режиме — ЗD (измерение навигационных параметров объектов над поверхностью Земли). Для нахождения трехмерного положения объекта требуется измерить навигационные параметры не менее 4-х НИСЗ, а при двухмерной навигации — не менее 3-х НИСЗ. В GPS используется псевдодальномерный способ определения позиции и псевдорадиально скоростной метод нахождения скорости объекта.
Для повышения точности результаты определений сглаживаются с помощью фильтра Калмана. Спутники GPS передают навигационные сигналы на двух частотах: F1 = 1575,42 и F2=1227,60 МГц. Режим излучения — непрерывный с псевдошумовой модуляцией. Навигационные сигналы представляют собой общедоступный С/А-код (course and acquisition), передаваемый только на частоте F1, и защищенный Р-код (precision code), излучаемый на частотах F1, F2.
В GPS для каждого НИСЗ определен свой уникальный С/А-код и уникальный Р-код. Такой вид разделения сигналов спутников называется кодовым. Он позволяет бортовой аппаратуре распознавать, какому спутнику принадлежит сигнал, когда все они осуществляют передачу на одной частоте GPS предоставляет два уровня обслуживания потребителей точные определения (РРS Precise positioning Service) и стандаршые данные (SPS Standart Positioning Service) PPS основывается на точном коде, а SPS — на общедоступном. Уровень обслуживания РРS предоставляется военным и федеральным службам США, а SPS — массовому гражданскому потребителю.Кроме навигационных сигналов, спутник регулярно передает сообщения, которые содержат информацию о состоянии спутника, его эфемеридах, системном времени, прогнозе ионосферной задержки, показателях работоспособности. Бортовая аппаратура GPS состоит из антенны и приемоиндикатора. ПИ включает в себя приемник, вычислитель, блоки памяти, устройства управления и индикации. В блоках памяти хранятся необходимые данные, программы решения задач и управления работой приемоиндикатора. В зависимости от назначения используется два вида бортовой аппаратуры: специальная и для массового потребителя.Специальная аппаратура предназначена для определения кинематических параметров ракет, военных самолетов, кораблей и специальных судов. При нахождении параметров объектов в ней используются Р и С/А коды. Эта аппаратура обеспечивает практически непрерывные определения с точностью: местоположения объекта — 5+7 м, скорости — 0.05+0.15 м/с, времени — 5+15 нс
Основное применение навигационных спутниковой системы GPS:
- Геодезия: с помощью GPS определяются точные координаты точек и границы земельных участков
- Картография: GPS используется в гражданской и военной картографии
- Навигация: с применением GPS осуществляется как морская, так и дорожная навигация
- Спутниковый мониторинг транспорта: с помощью GPS ведётся мониторинг за положением, скоростью автомобилей, контроль за их движением
- Сотовая связь: первые мобильные телефоны с GPS появились в 90-х годах. В некоторых странах, например США это используется для оперативного определения местонахождения человека, звонящего 911.
- Тектоника, Тектоника плит: с помощью GPS ведутся наблюдения движений и колебаний плит
- Активный отдых: есть разные игры, где применяется GPS, например, Геокэшинг и др.
- Геотегинг: информация, например фотографии «привязываются» к координатам благодаря встроенным или внешним GPS-приёмникам.
Определение координат потребителя
Местоопределение по расстояниям до спутников
Координаты местоположения вычисляются на основе измеренных дальностей до спутников. Для определения местоположения необходимо провести четыре измерения. Трех измерений достаточно, если уметь исключать неправдоподобные решения какими-то другими доступными способами. Еще одно измерение требуется по техническим причинам.
Измерение расстояния до спутника
Расстояние до спутника определяется путем измерения промежутка времени, который требуется радиосигналу, чтобы дойти от спутника до нас. Как спутник, так и приемник генерируют один и тот же псевдослучайный код строго одновременно в общей шкале времени. Определим, сколько времени потребовалось сигналу со спутника, чтобы дойти до нас, путем сравнения запаздывания его псевдослучайного кода по отношению коду приемника.
Обеспечение совершенной временной привязки
Точная временная привязка — ключ к измерению расстояний до спутников. Спутники точны по времени, поскольку на борту у них — атомные часы. Часы приемника могут и не быть совершенными, так как их уход можно исключить при помощи тригонометрических вычислений. Для получения этой возможности необходимо произвести измерение расстояния до четвертого спутника. Необходимость в проведении четырех измерений определяет устройство приемника.
Определение положения спутника в космическом пространстве.
Для вычисления своих координат нам необходимо знать как расстояния до спутников, так и местонахождение каждого в космическом пространстве. Спутники GPS движутся настолько высоко, что их орбиты очень стабильны и их можно прогнозировать с большой точностью. Станции слежения постоянно измеряют незначительные изменения в орбитах, и данные об этих изменениях передаются со спутников.
Ионосферные и атмосферные задержки сигналов.
Существуют два метода, которые можно использовать, чтобы сделать ошибку минимальной. Во-первых, можно предсказать, каково будет типичное изменение скорости в обычный день, при средних ионосферных условиях, а затем ввести поправку во все наши измерения. Но, к сожалению, не каждый день является обычным. Другой способ состоит в сравнении скоростей распространения двух сигналов, имеющих разные частоты несущих колебаний. Если сравнить время распространения двух разночастотных компонентов сигнала GPS, то сможем выяснить, какое замедление имело место. Этот метод корректировки достаточно сложен и используется только в наиболее совершенных, так называемых «двухчастотных» приемниках GPS.
Многолучевость.
Еще один тип погрешностей — это ошибки «многолучевости». Они возникают, когда сигналы, передаваемые со спутника, многократно переотражаются от окружающих предметов и поверхностей до того, как попадают в приемник.
Геометрический фактор уменьшения точности.
Хорошие приемники снабжают вычислительными процедурами, которые анализируют относительные положения всех доступных для наблюдения спутников и выбирают из них четырех кандидатов, т.е. наилучшим образом расположенные четыре спутника.
Результирующая точность GPS.
Результирующая погрешность GPS определяется суммой погрешностей от различных источников. Вклад каждого из них варьируется в зависимости от атмосферных условий и качества оборудования. Кроме того, точность может быть целенаправленно снижена Министерством обороны США в результате установки на спутниках GPS так называемого режима S/A («Selective Availability»- ограниченный доступ). Этот режим разработан для того, чтобы не дать возможному противнику тактического преимущества в определении местоположения с помощью GPS. Когда и если этот режим установлен, он создает наиболее существенную компоненту суммарной погрешности GPS.
Вывод:
Точность измерений с помощью GPS зависит от конструкции и класса приёмника, числа и расположения спутников (в реальном времени), состояния ионосферы и атмосферы Земли (сильной облачности и т.д.), наличия помех и других факторов. «Бытовые» GPS-приборы, для «гражданских» пользователей, имеют погрешность измерения в диапазоне от ±3-5м до ±50м и больше (в среднем, реальная точность, при минимальной помехе, если новые модели, составляет ±5–15 метров в плане). Максимально возможная точность достигает +/- 2-3 метра на горизонтали. По высоте – от ±10-50м до ±100-150 метров. Высотомер будет точнее, если проводить калибровку цифрового барометра по ближайшей точке с известной точной высотой, (из обычного атласа, например) на ровном рельефе местности или по известному атмосферному давлению (если оно не слишком быстро меняется, при перемене погоды). Измерители высокой точности «геодезического класса» – точнее на два-три порядка (до сантиметра, в плане и по высоте). Реальная точность измерений обусловлена различными факторами, например – удаленностью от ближайшей базовой (корректирующей) станции в зоне обслуживания системы, кратностью (числом повторных измерений / накоплений на точке), соответствующим контролем качества работ, уровнем подготовки и практическим опытом специалиста. Такое высокоточное оборудование — может применяться только специализированными организациями, специальными службами и военными.
Для повышения точности навигации рекомендуется использовать GPS-приёмник – на открытом пространстве (нет рядом зданий или нависающих деревьев) с достаточно ровным рельефом местности, и подключать дополнительную внешнюю антенну. Для целей маркетинга, таким аппаратам приписывают «двойную надёжность и точность» (ссылаясь на, одновременно используемые, две спутниковые системы, Глонасс и Джипиэс), но реальное фактическое, улучшение параметров (повышение точности определения координат) может составлять величины — лишь до нескольких десятков процентов. Возможно только заметное сокращение времени горячего-тёплого старта и продолжительности измерений
Качество измерений джипиэс ухудшается, если спутники располагаются на небе плотным пучком или на одной линии и «далеко» – у линии горизонта (всё это называется «плохая геометрия») и есть помехи сигналу (закрывающие, отражающие сигнал высотные здания, деревья, крутые горы поблизости). На дневной стороне Земли (освещённой, в данный момент, Солнцем) — после прохождения через ионосферную плазму, радиосигналы ослабляются и искажаются на порядок сильнее, чем на ночной. Во время геомагнитной бури, после мощных солнечных вспышек — возможны перебои и длительные перерывы в работе спутникового навигационного оборудования.
Фактическая точность джипиэски зависит от типа GPS-приемника и особенностей сбора и обработки данных. Чем больше каналов (их должно быть не меньше 8) в навигаторе, тем точнее и быстрее определяются верные параметры. При получении «вспомогательных данных A-GPS сервера местоположения» по сети Интернет (путём пакетной передачи данных, в телефонах и смартфонах) — увеличивается скорость определения координат и расположения на карте
WAAS (Wide Area Augmentation System, на американском континенте) и EGNOS (European Geostationary Navigation Overlay Services, в Европе) – дифференциальные подсистемы, передающие через геостационарные (на высоте от 36 тыс.км в нижних широтах до 40 тысяч километров над средними и высокими широтами) спутники корректирующую информацию на GPS-приёмники (вводятся поправки). Они могут улучшить качество позиционирования ровера (полевого, передвижного приемника), если поблизости располагаются и работают наземные базовые корректирующие станции (стационарные приёмники опорного сигнала, уже имеющие высокоточную координатную привязку). При этом полевой и базовый приёмник должны одновременно отслеживать одноимённые спутники.

Для повышения скорости измерений рекомендуется применять многоканальный (8-и канальный и более), приёмник с внешней антеной. Должны быть видимы, как минимум, три спутника GPS. Чем их больше, тем лучше результат. Необходима, так же, хорошая видимость небосвода (открытый горизонт). Быстрый, «горячий» (длительностью в первые секунды) или «тёплый старт» (полминуты или минута, по времени) приёмного устройства — возможен, если он содержит актуальный, свежий альманах. В случае, когда навигатор долго не использовался, приёмник вынужден получать полный альманах и, при его включении, будет производиться холодный старт (если прибор с поддержкой AGPS, тогда быстрее — до нескольких секунд). Для определения только горизонтальных координат (широта / долгота) может быть достаточно сигналов трёх спутников. Для получения трёхмерных (с высотой) координат — нужны, как минимум, четыре сп-ка. Необходимость создания собственной, отечественной системы навигации связана с тем, что GPS – американская, потенциальных противников, которые могут в любой момент Ч, в своих военных и геополитических интересах, селективно отключить, «глушить», модифицировать её в каком-либо регионе или увеличить искусственную, систематическую ошибку в координатах (для иностранных потребителей этой услуги), что и в мирное время всегда присутствует.
Глобальная навигационная спутниковая система ГЛОНАСС
![]()
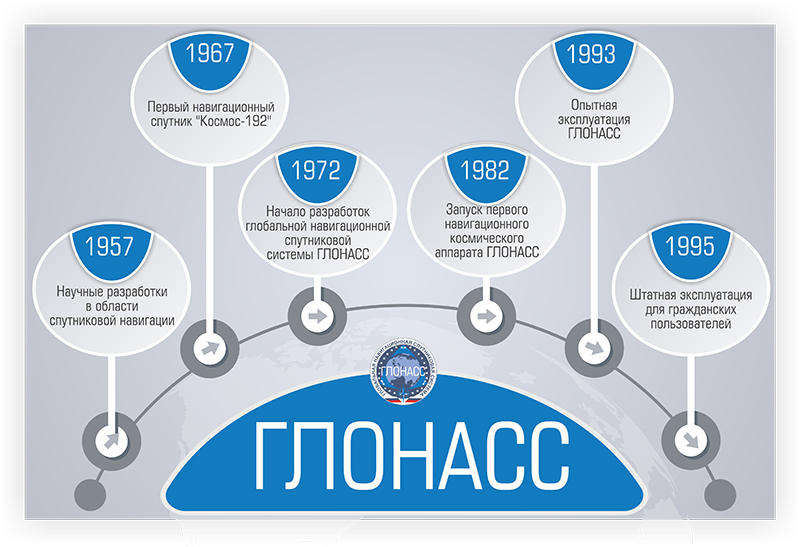
История развития ГЛОНАСС
Впервые предложение по использованию спутников для навигации было сделано проф. В.С. Шебшаевичем в 1957г. Эта возможность была открыта им при исследовании приложений радиоастрономических методов в самолетовождении. Данные исследования были использованы в 1963г. при опытно-конструкторских работах над первой отечественной низкоорбитальной системой «Цикада».
В 1967г. был выведен на орбиту первый навигационный отечественный спутник «Космос-192».
Система «Цикада» была сдана в эксплуатацию в составе четырех спутников в 1979 г.
После 2008 года потребители космических навигационных систем «Цикада» и «Цикада-М» были переведены на обслуживание ГЛОНАСС, и эксплуатация этих систем была прекращена.
Летные испытания высокоорбитальной отечественной навигационной системы, получившей название ГЛОНАСС, были начаты в октябре 1982 г. запуском спутника «Космос-1413». Система ГЛОНАСС была принята в опытную эксплуатацию в 1993 г.
В 1995 г. развернута орбитальная группировка полного состава (24 КА «Глонасс» первого поколения) и начата штатная эксплуатация системы.
Структура ГЛОНАСС
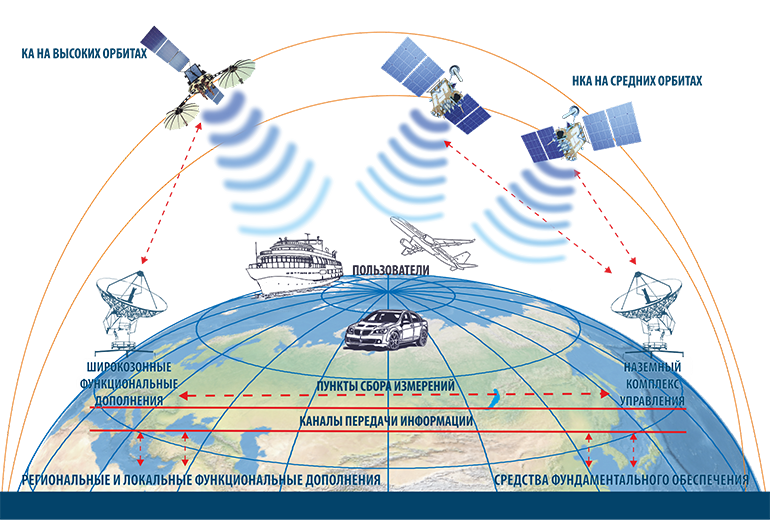
Система ГЛОНАСС в расширенной конфигурации включает в себя следующие составные части:
- Космический комплекс системы ГЛОНАСС, состоящий из орбитальной группировки, средств выведения, наземного комплекса управления
- Функциональные дополнения, включая широкозонную систему функционального дополнения ГНСС – систему дифференциальных коррекций и мониторинга, а также региональные и локальные системы мониторинга и дифференциальной навигации
- Система высокоточной апостериорной эфемеридно-временной информации
- Средства фундаментального обеспечения ГЛОНАСС – системы оперативного определения параметров вращения и ориентации Земли, системы формирования государственной шкалы всемирного скоординированного времени, геодезической основы РФ
- Навигационная аппаратура потребителей
Головная организация по развитию и использованию системы ГЛОНАСС — АО «Российские космические системы».
Головная организация по космическому комплексу ГЛОНАСС — АО «Информационные спутниковые системы» имени академика М.Ф. Решетнёва».
Оператор государственной автоматизированной информационной системы «ЭРА-ГЛОНАСС» — АО «ГЛОНАСС».
Федеральный сетевой оператор в сфере навигационной деятельности — НП «ГЛОНАСС».
Оперативный круглосуточный мониторинг и подтверждение характеристик навигационного поля ГЛОНАСС осуществляет Информационно-аналитический центр координатно-временного и навигационного обеспечения АО «ЦНИИмаш».
Международная деятельность
Международное сотрудничество, осуществляемое Российской Федерацией в области ГНСС, призвано содействовать обеспечению устойчивого развития системы ГЛОНАСС и направлено на расширение эффективного участия в соглашениях по глобальной спутниковой навигации.
За последние годы своего развития ГНСС и их функциональные дополнения стали основой систем координатно-временного и навигационного обеспечения развитых стран, существенным элементом государственных и частных секторов мировой экономики. С одновременным функционированием нескольких ГНСС возрастает необходимость координации программ их развития между странами–владельцами таких систем, а также международными организациями, непосредственно связанными с развитием и использованием ГНСС. Международное сотрудничество в области ГНСС – важнейшая составная часть национальной политики Российской Федерации в области космической деятельности.
С целью обеспечения совместимости и взаимодополняемости системы ГЛОНАСС с другими ГНСС и продвижения ее использования за рубежом специалисты ИАЦ КВНО АО «ЦНИИмаш» участвуют самостоятельно и организуют участие российских представителей в мероприятиях:
- Международного комитета по ГНСС, созданного по инициативе Генеральной Ассамблеи ООН;
- Международной службы глобальных навигационных спутниковых систем (IGS), где ИАЦ КВНО является ассоциированным центром анализа службы IGS;
- Международной службы лазерной дальнометрии (ILRS), где ИАЦ КВНО – ассоциированный центр анализа службы ILRS;
- Международной службы вращения Земли (IERS), где ИАЦ КВНО – официальный центр анализа IERS;
- Комиссии по авиационным радиотехническим средствам (RTCA), на заседаниях которой обсуждаются вопросы включения системы ГЛОНАСС в стандарты авиационной навигационной аппаратуры;
- Международной организации гражданской авиации (ICAO), на заседаниях которой представляется информация о создаваемом в Российской Федерации Стандарте эксплуатационных характеристик открытых услуг системы ГЛОНАСС.
Специалисты ИАЦ КВНО также участвуют в двусторонних переговорах и консультациях с провайдерами зарубежных глобальных и региональных навигационных систем, участвуют в работах по созданию за рубежом наземного измерительного сегмента системы ГЛОНАСС, являющимся одним из важнейших факторов обеспечения ее конкурентоспособности и широкого применения.
Повышение точности навигации
На протяжении всей истории развития спутниковой радионавигации доминирующей была и остаётся проблема повышения точности навигационных определений, что требует совершенствования как аппаратных и программно-алгоритмических средств, так и развития систем функциональных дополнений ГНСС.
Система функциональных дополнений ГНСС представляет собой комплекс технических и программных средств, которая передаёт потребителям навигационных сигналов дополнительную корректирующую информацию для повышения точности и надежности навигационных определений.
В настоящее время в России и за рубежом созданы и развиваются различные функциональные дополнения, ориентированные на различных потребителей и отличающиеся местом размещения, размером зон обслуживания, типом канала доведения корректирующей информации.
Применение ГЛОНАСС
Местоопределение
Услуги, основанные на данных о местоположении
- Целевая реклама
- Пространственно-ориентированный доступ к информационным ресурсам
- Геопространственные информационные системы
- Комплексная информация об окружающем пространстве
Мониторинг
- Мониторинг местоположения людей, животных и имущества
- Координация экипажей экстренных служб
- Мониторинг перемещения высокоценных грузов
- Оперативный мониторинг состояния железнодорожных путей
Геодезия и картография
- Геодезическая съёмка
- Кадастровые работы, межевание
- Поддержка проведения инженерных работ и строительства
- Актуализация карт и планов
Строительство
- Автоматизированное управление строительной техникой
- Дорожные строительные работы
- Прокладка коммуникаций, трубопроводов и др.
- Строительство и ремонт железнодорожных путей
Навигация
Досуг и отдых
- Пеший туризм
- Рыбная ловля, охота
- Лодочный спорт
- Прокладка маршрутов путешествий
- Персональные аварийные маяки
Наземный транспорт
- Автономное построение маршрутов движения
- Интеллектуальные транспортные системы
- Оперативный мониторинг состояния железнодорожных путей
Сельское хозяйство
- Оптимизация посадки, полива и сбора урожая
- Повышение эффективности опыления посевов
- Обслуживание сельскохозяйственной техники
Авиация
- Заход и посадка по категориям ИКАО
- Маршрутная навигация
- Повышение безопасности вертолетовождения
- Навигация беспилотных летательных аппаратов
Космос
- Отслеживания средств выведения
- Высокоточное определение орбит космических аппаратов
- Определение ориентации космического аппарата относительно Солнца
Водный транспорт
- Подход и маневрирование в портах, на внутренних водных путях
- Навигация на внутренних водных путях
- Мониторинг и учёт флота
Научные исследования и синхронизация
Окружающая среда
- Мониторинг деформаций Земли
- Мониторинг параметров вращения Земли
- Мониторинг состава и состояния тропосферы и ионосферы
- Мониторинг водных и лесных ресурсов
- Добыча полезных ископаемых
Связь и синхронизация
- Синхронизация работы линий электропередач
- Синхронизация средств связи и телекоммуникаций
- Синхронизация времени разнесённых в пространстве потребителей
- Всемирное скоординированное время (UTC)
Технические характеристики
Система ГЛОНАСС предоставляет потребителю два вида услуг – стандартной и высокой точности.
Услуги стандартной точности предоставляются потребителям посредством передачи сигналов стандартной точности в L-диапазоне частот. Каждый космический аппарат «Глонасс-М» передаёт навигационные радиосигналы с частотным разделением в двух диапазонах: L1 (1,6 ГГц) и L2 (1,25 ГГц).
Сигнал стандартной точности с тактовой частотой 0,511 МГц, предназначенный для использования отечественными и зарубежными гражданскими потребителями, доступен для всех потребителей, оснащенных соответствующей АП, в зоне видимости которых находятся спутники системы ГЛОНАСС.
Спутниковая группировка
Штатная орбитальная группировка ГЛОНАСС состоит из 24 спутников, находящихся на средневысотных околокруговых орбитах с номинальными значениями высоты – 19100 км, наклонения – 64,8° и периода – 11 часов 15 минут 44 секунды. Значение периода позволило создать устойчивую орбитальную систему, не требующую, в отличие от орбит GPS, для своего поддержания корректирующих импульсов практически в течение всего срока активного существования. Номинальное наклонение обеспечивает стопроцентную доступность навигации на территории РФ даже при условии выхода из орбитальной группировки нескольких КА.
| КОЛИЧЕСТВО ШТАТНЫХ КА | 24 |
| ВЫСОТА ОРБИТЫ | 19 100 км |
| КОЛИЧЕСТВО ПЛОСКОСТЕЙ | 3 |
| БОЛЬШАЯ ПОЛУОСЬ | 25 420 км |
| ПЕРИОД | 11 часов 15 минут 44 с |
| НАКЛОНЕНИЕ | 64,8° |
Текущее состояние ОГ ГЛОНАСС
Типы космических аппаратов
Характеристики |
КА «Глонасс» |
КА «Глонасс-М» |
КА «Глонасс-К» |
КА «Глонасс-К2» |
|---|---|---|---|---|
| Годы развертывания | 1982-2005 | 2003-2016 | 2011-2018 | после 2017 |
| Состояние | Выведен из эксплуатации | В эксплуатации | В разработке на основе проведенных ЛИ | В разработке |
| Используемые средства выведения | РН «Союз-2.1б», РН «Протон-М» | |||
| Гарантированный срок активного существования, лет | 3.5 | 7 | 10 | 10 |
| Масса КА, кг | 1500 | 1415 | 935 | 1600 |
| Габариты КА, м | 2,71х3,05х2,71 | 2,53х3,01х1,43 | 2,53х6,01х1,43 | |
| Энергопотребление, Вт | 1400 | 1270 | 4370 | |
| Тип исполнения КА | герметизированный | герметизированный | негерметизированный | негерметизированный |
| Суточная нестабильность БСУ, в соответствии с ТЗ / фактическая | 5*10-13 / 1*10-13 | 1*10-13 / 5*10-14 | 1*10-13 / 5*10-14 | 1*10-14 / 5*10-15 |
| Тип сигналов | FDMA | в основном FDMA (CDMA на КА 755-761) | FDMA и CDMA | FDMA и CDMA |
| Сигналы с открытым доступом (для сигналов FDMA приведено значение центральной частоты) | L1OF (1602 МГц) | L1OF (1602 МГц) L2OF (1246 МГц) начиная с №755: L3OC (1202 МГц) |
L1OF (1602 МГц) L2OF (1246 МГц) L3OC (1202 МГц) начиная с №17Л: L2OC (1248 МГц) |
L1OF (1602 МГц) L2OF (1246 МГц) L1OC (1600 МГц) L2OC (1248 МГц) L3OC (1202 МГц) |
| Сигналы с санкционированным доступом | L1SF (1592 МГц) L2SF (1237 МГц) |
L1SF (1592 МГц) L2SF (1237 МГц) |
L1SF (1592 МГц) L2SF (1237 МГц) начиная с №17Л: L2SC (1248 МГц) |
L1SF (1592 МГц) L2SF (1237 МГц) L1SC (1600 МГц) L2SC (1248 МГц) |
| Наличие межспутниковых линий связи: радио оптическая |
— — |
+ — |
+ — |
+ + |
| Наличие системы поиска и спасания | — | — | + | + |
Навигационные радиосигналы
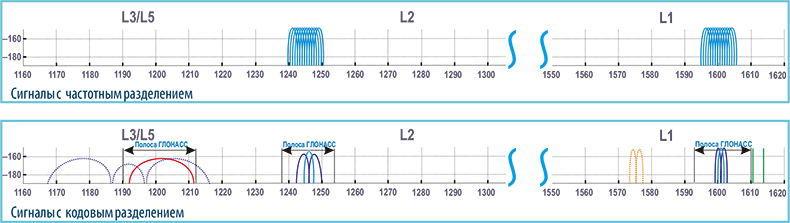
На этапе проектировании для системы ГЛОНАСС был принят частотный метод разделения сигналов различных космических аппаратов: каждый из них использует свою пару несущих частот, одна из которых принадлежит диапазону L1, другая – диапазону L2.
Для космических аппаратов, которые находятся в диаметрально противоположных точках орбиты, используются одинаковые литерные частоты, по 12 в каждом диапазоне частот.
Выведенный на орбиту в 2011 году для лётных испытаний космический аппарат модификации «Глонасс-К» 1-го этапа наряду с радиосигналами L1 и L2 с частотным разделением, полностью аналогичным сигналам «Глонасс-М», дополнительно излучает в диапазоне L3 радиосигналы открытого доступа с кодовым разделением. Модернизированные аппараты «Глонасс-М» № 55–61 также излучают навигационный радиосигнал с кодовым разделением в диапазоне L3.
Спектр навигационных радиосигналов системы ГЛОНАСС
| Диапазон | Несущая частота, МГц | Сигнал | Длительность кода ПСП, символы |
Тактовая частота, МГц | Вид модуляции | Скорость передачи ЦИ, бит/с |
|---|---|---|---|---|---|---|
| L1 | 1 600,995 | L1OCd L1OCp |
1 023 4 092 |
1,023 1,023 |
BPSK (1) BOC (1,1) |
125 пилот-сигнал |
| L2 | 1 248,06 | L2 КСИ L2OCp |
1 023 4 092 |
1,023 1,023 |
BPSK (1) BOC (1,1) |
250 пилот-сигнал |
| L3 | 1 202,025 | L3OCd L3OCp |
10 230 10 230 |
10,23 10,23 |
BPSK (10) BPSK (10) |
100 пилот-сигнал |
Система координат и шкала времени
Система координат
Передаваемые каждым космическим аппаратом системы ГЛОНАСС в составе оперативной информации эфемериды описывают положение фазового центра передающей антенны данного КА в связанной с Землей геоцентрической системе координат ПЗ-90, определяемой следующим образом:
- начало координат расположено в центре масс Земли;
- ось Z направлена в Условный полюс Земли, как определено в рекомендации Международной службы вращения Земли (IERS);
- ось X направлена по линии пересечения плоскости экватора Земли и начального меридиана, установленного Международным бюро времени (BIH);
- ось Y дополняет геоцентрическую прямоугольную систему координат до правой.
Справочный документ «ПАРАМЕТРЫ ЗЕМЛИ 1990 ГОДА» (ПЗ-90.11)
ВОЕННО-ТОПОГРАФИЧЕСКОЕ УПРАВЛЕНИЕ ГЕНЕРАЛЬНОГО ШТАБА ВООРУЖЕННЫХ СИЛ РОССИЙСКОЙ ФЕДЕРАЦИИ, Москва, 2014 г.
| Параметр | Значение |
|---|---|
| Угловая скорость вращения Земли | 7,292115×10-5 радиан/с |
| Геоцентрическая константа гравитационного поля Земли с учетом атмосферы | 398 600,44×109 м3/с2 |
| Геоцентрическая константа гравитационного поля атмосферы Земли (fMa) | 0.35×109 м3/с2 |
| Скорость света | 299 792 458 м/с |
| Большая полуось эллипсоида | 6 378 136 м |
| Коэффициент сжатия эллипсоида | 1/298,257 839 303 |
| Гравитационное ускорение на экваторе Земли | 978 032,8 мгал |
| Поправка к гравитационному ускорению на уровне моря, обусловленная влиянием атмосферы Земли | -0,9 мгал |
| Вторая зональная гармоника геопотенциала (J20) | 1082625,7×10-9 |
| Четвертая зональная гармоника геопотенциала (J40) | (- 2370,9×10-9) |
| Нормальный потенциал на поверхности общеземного эллипсоида (U0) | 62 636 861,074 м2/s2 |
Система времени
В качестве шкалы системного времени ГЛОНАСС принята условная непрерывная шкала времени, формируемая на основе шкалы времени Центрального синхронизатора системы. Центральный синхронизатор оснащен водородными стандартами частоты.
Опорной шкалой времени для системы ГЛОНАСС является национальная координированная шкала времени России UTC(SU). Расхождение между шкалой системного времени ГЛОНАСС и UTC(SU) не должна превышать 1 мс.
Шкала системного времени ГЛОНАСС корректируется одновременно с плановой коррекцией на целое число секунд шкалы координированного всемирного времени UTC.
Наземный комплекс управления
Наземный комплекс управления ГЛОНАСС включает в себя:
- Центр управления системой (ЦУС ГЛОНАСС)
- Контрольные станции (КС)
- Центральный синхронизатор (ЦС)
Интерфейсный контрольный документ
Интерфейсные контрольные документы для сигналов ГЛОНАСС
Официальный сайт
Пользовательский информационный центр ГЛОНАСС: www.glonass-iac.ru
Наверх
О некоторых проблемах синхронизации точного времени сигналами ГЛОНАСС
Ключевые слова: синхронизация точного времени, погрешность синхронизации времени, ГЛОНАСС, нормативный документ, сеть связи.
Синхронизация единого точного времени на сетях связи сигналами ГЛОНАСС имеет как преимущества так и недостатки относительно наземных средств передачи сигналов точного времени. Основным преимуществом является низкая стоимость создания структуры системы единого точного времени. Основным недостатком является наличие дополнительных специфических погрешностей синхронизации. В отличие от синхронизации тактовой частоты, синхронизация точного времени на сетях связи не достаточно исследована. Отсутствует необходимая информация о степени влияния погрешностей различного вида на конечный результат синхронизации времени, а также инженерные формулы расчета погрешностей. Не разработаны нормативные документы, содержащие обязательные требования к процессу синхронизации времени и к значениям погрешностей синхронизации. Рассматриваются метрологические аспекты использования сигналов ГЛОНАСС для синхронизации шкалы времени системы единого точного времени, которую необходимо создать на сети связи общего пользования. Обсуждаются основные причины погрешностей синхронизации точного времени, их источники и отражение в нормативных документах и рекомендациях. Приводятся результаты оценки значений некоторых погрешностей, имеющих место при синхронизации точного времени на сетях связи сигналами ГЛОНАСС.
Филимонов С. Н.,
директор по науке ФГУП ЦНИИС, д.т.н., filimonov@zniis.ru
Проблема создания системы единого точного времени (СЕТВ) на сети связи общего пользования (ССОП) уже достаточно давно обсуждается специалистами отрасли связи. Рассматриваются варианты ее структуры и их особенности, возможный состав технических средств . Обсуждается, в том числе, возможность использования сигналов ГЛОНАСС для синхронизации часов СЕТВ, а также проблема метрологического обеспечения СЕТВ, от которого зависит точность значения времени, поставляемого СЕТВ потребителям.
Приказом Минкомсвязи от 25.12.2009 № 184 измерение расхождения шкал времени в сетях операторов связи относительно шкалы координированного времени РФ иТС(51_1) (хранимой первичным государственным эталоном времени и частоты) отнесено к сфере государственного регулирования обеспечения единства измерений в части компетенции Министерства связи и массовых коммуникаций Российской Федерации и, соответственно, должно контролироваться надзорными органами. Однако, до настоящего времени нет утверждённых нормативными правовыми актами обязательных требований к величине расхождения шкал времени, без чего реализация контроля не возможна. Отсутствие обязательных требований может объясняться, в том числе, отсутствием исследований зависимостей расхождения шкал времени от влияющих факторов, а также конкретных численных значений.
Сигналы ГЛОНАСС являются одним из наиболее доступных способов распространения информации о точном времени от государственного эталона времени и частоты до потребителей. Глобальный характер покрытия поверхности Земли сигналами ГЛОНАСС, при условии полного состава группировки навигационных космических аппаратов (НКА), гарантирует доступность сигналов единого точного времени на всей территории Российской Федерации. Этот способ распространения точного времени удобен, легко реализуем технически и, в соответствии с Федеральным законом «Об исчислении времени» , обеспечен правовой поддержкой.
При использовании ГЛОНАСС для синхронизации шкалы времени ССОП единое точное время должно распространяется от государственного эталона единиц времени, частоты и национальной шкалы времени (ГЭВЧ) через подсистему хранения и передачи эталонных сигналов точного времени ГЛОНАСС к наземным приёмникам сигналов
ГЛОНАСС, входящим в структуру СЕТВ, и далее к средствам синхронизации и распространения точного времени на ССОП до конечных потребителей. В настоящее время в подсистему хранения и передачи эталонных сигналов точного времени ГЛОНАСС входят:
— центральный синхронизатор, содержащий наземные стандарты времени и частоты (НСВЧ), синхронизируемые от эталона времени и частоты (ЭВЧ);
-бортовые стандарты времени и частоты (БСВЧ), один или два раза в сутки синхронизируемые от наземного центрального синхронизатора (ЦС), входящего в состав подсистемы контроля и управления ГЛОНАСС.
Сигналы, соответствующие шкале времени БСВЧ, передаются к поверхности Земли, где должны приниматься, воспроизводиться и распространяться средствами СЕТВ.
Точность времени, распространяемого СЕТВ, должна периодически контролироваться независимой службой, оснащенной отдельным контрольным стандартом времени и частоты (КСВЧ). Этот стандарт для обеспечения объективности контроля должен синхронизироваться от ГЭВЧ по независимым от ГЛОНАСС и СЕТВ каналам.
Известно , что в сетях сотовой связи требуется точная частотная настройка с относительными погрешностями 0,5 х 10″* для технологии TDMA и 0,5 х 10’7 для технологий GSM и CDMA. Требования же к точности синхронизации времени чаще всего определяют сами производители средств связи.
Согласно рекомендациям ITU-R , технические средства глобальных навигационных систем GPS и ГЛОНАС должны обеспечивать погрешность шкалы времени не более + 500 не. Опорной шкалой времени для системы ГЛОНАСС является национальная координированная шкала времени РФ — UTC(SU). Поправки к шкале системного времени ГЛОНАСС относительно UTC(SU) вычисляются в подсистеме контроля и управления наземного комплекса управления и один или два раза в сутки передаются на борт каждого НКА эксплуатируемой группировки. Кроме того, в состав наземного комплекса управления входят средства коррекции шкал времени НКА относительно эталонной шкалы ЦС по передаваемым из наземного центра управления поправкам. Оперативная информация, транслируемая от НКА наземным приёмникам, содержит значение времени по шкале НКА и погрешность (расхождение) шкалы времени НКА (БСВЧ) относительно шкалы времени системы ГЛОНАСС (НСВЧ).
Значения метрологических характеристик подсистемы хранения, воспроизведения и передачи сигналов времени ГЛОНАСС позволяют использовать их для синхронизации
шкалы времени СЕТВ. Однако при передаче сигналов точного времени от ГЛОНАСС к СЕТВ проявляются дополнительные источники погрешностей: время распространения радиосигнала от НКА к приемнику, задержки в аппаратуре передатчика и приемника, фазовые сдвиги за счет рефракционных явлений в ионосфере и тропосфере, «отставание» (замедление) бортового времени навигационного космического аппарата, вызванное релятивистскими эффектами.
Задержки распространения в бортовой аппаратуре измеряются при подготовке НКА к запуску и затем учитываются при синхронизации БСВЧ от ЦП. Групповая задержка радиосигнала в бортовой аппаратуре включает детерминированную и недетерминированную составляющие. Детерминированная составляющая учитывается в виде поправки при синхронизации системного времени ГЛОНАСС. Максимальное значение недетерминированной составляющей групповой задержки радиосигнала в бортовой аппаратуре НКА не должно превышать ±2 не . Задержки в аппаратуре приёмников СЕТВ должны измеряться при вводе их в эксплуатацию, контролироваться в процессе эксплуатации и учитываться при синхронизации шкалы времени СЕТВ по сигналам от ГЛОНАСС.
Вклад релятивистских эффектов в расхождение значений времени, отсчитываемого часами НКА ГЛОНАСС и времени, отсчитываемого наземными часами СЕТВ, расположенными неподвижно относительно поверхности Земли можно оценить, используя формулы, приведённые в рекомендации ITU-R TF.20I8 . Формулы приведены для расчётов в геоцентрической инерциальной системе отсчёта, обозначаемой ECI (Earth-Centered Inertial) , в которой Земля имеет только вращательное движение вокруг собственной оси. В дальнейшем в тексте вместо термина «Земля» будем использовать термин «геоид», под которым понимается небесное тело с определёнными физическими и геометрическими параметрами.
Расхождение интервала времени At’, отсчитанного часами, расположенными на НКА, и интервала времени Ат (от момента А до момента В), отсчитанного часами СЕТВ, расположенными на уровне моря на поверхности геоида, определяется выражениями :
A,= £|l+I-(f/-ff;)+-Lv2l/r, (О
где U — гравитационный потенциал в точке нахождения НКА, определяемый выражением :
6)).
(2)
что часы СЕТВ находятся на уровне моря. Отклонение от уровня моря внесёт в результат нашей оценки погрешность порядка 0,005% на каждый километр отклонения, чем вполне можно пренебречь.
Гравитационный потенциал часов НКА изменяется из-за изменения высоты НКА относительно геоида при движении НКА по орбите. При этом минимальное удаление НКА от геоида составляег 18840 км, а максимальное 19440 км . Таким образом, относительное изменение расстояния НКА от начала координат ЕС1, которое совпадает с центром масс геоида, составляет примерно 2,4 %. Для упрощения расчётов можно пренебречь этим изменением, считая, что приемлемое значение погрешности оценки расхождения часов будет составлять порядка 5 %. Таким образом, считая разницу ({/ — И7″) не зависящей от времени и используя для расчёта максимальное не зависящее от времени значение V, получим простое выражение для расчета искомой граничной сверху оценки:
Д/’= Дг +
(U-W0) г2 |А д
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
—-^~- + —т |Аг = Дг + г,
с» 2с’
(3)
где Ат — интервал времени, соответствующий интервалу интегрирования (от момента А до момента В), е — расхождение интервала времени Ат, отсчитанного по часам СЕТВ, относительно интервала времени Аіотсчитанного по часам НКА.
Из выражения (3) легко определить относительное значение расхождения:
Г,
Єє = — = Ат
(,U~W0)
2с2
(4)
В выражении (2) обозначено: С — гравитационная постоянная, М — масса геоида, г — расстояние от центра масс геоида до точки расположения НКА, — вторая зональная гармоника разложения гравитационного потенциала в ряд по сферическим функциям, — средний экваториальный радиус геоида, со — широта геоида, Ир — гравитационный потенциал на поверхности геоида (на уровне моря), с — скорость света в вакууме, V = гпах | «’НКЛ — V, | — максимальное значение модуля разности вектора скорости часов, расположенных на НКА и вектора скорости часов, расположенных на поверхности геоида, измеренных в геоцентрической инерциальной системе отсчета, Уцка ~ вектор скорости НКА, У|г — вектор скорости часов СЕТВ, движущихся вместе с поверхностью геоида.
Выражение (1) представлено в виде интеграла в предположении, что разница гравитационных потенциалов и относительной скорости перемещения рассматриваемых часов могут зависеть от времени. Для рассматриваемой ситуации часы, находящиеся в СЕТВ являются стационарными относительно геоида и потому их гравитационный потенциал не зависит от времени. Для простоты оценки будем считать,
Векторы скоростей рассматриваемых часов циклически изменяют своё направление при вращении геоида вокруг оси и при движении НКА по орбите. Модуль V разности векторов скоростей принимает максимальное значение, когда орбиты движения часов НКА и СЕТВ находятся в одной плоскости, проходящей через центр геоида, и направлены противоположно друг другу. Оно равно сумме модуля скорости часов НКА и модуля скорости часов СЕТВ в неподвижной инерциальной системе отсчёта (ЕС1).
Модуль скорости часов НКА можно определить, зная значение драконического периода НКА и среднее расстояние НКА до центра геоида (начала координат ЕС1). Модуль скорости часов СЕТВ зависит от широты ш расположения часов на поверхности геоида и определяется выражением:
, . 2лЛ, соъсо
УЕ(<р) =——*——.
Е 86400с
Исходные данные для расчёта граничной сверху оценки расхождения часов, расположенных на НКА ГЛОНАСС и на поверхности геоида на широте Москвы приведены в таблице.
Подставив в выражение (4) значения параметров из таблицы получим искомое значение граничной сверху оценки относительного расхождения показаний часов НКА и часов СЕТВ. Общее значение относительного расхождения показаний часов НКА и часов СЕТВ, расположенных на широте Москвы, составляет: минус (0,43 ± 0,02)-10 4, т.е. часы НКА опаздывают относительно наземных часов примерно на 0,43 наносекунды за каждую секунду.
При желании легко можно оценить влияние широты расположения часов СЕТВ на полученный результат. При размещении часов СЕТВ на экваторе геоида полученное значение оценки расхождения увеличится примерно на 1,6 %.
Расхождение за счет разницы гравитационных потенциалов часов почти не зависит от времени и может считаться систематической составляющей погрешности, которая может быть определена и исключена из общей погрешности передачи точного времени. Расхождение за счет ненулевых значений разницы векторов скоростей движения часов не
только циклически изменяется во времени, но зависит также от угла между плоскостями, в которых лежат вектора скорости и центр геоцентрической инерциальной системе отсчета. Вычисление и исключение этой составляющей погрешности возможно, но трудоемко. Она может составлять до 25% от общего значения расхождения часов.
Параметр Обозна- чение Значение Примечание
Дракон и чес кий период КА ГЛОНАСС тд 40544 с
Высота КА ГЛОНАСС над поверхностью геоида h от 18840 до 19440 км
Средний экваториальный радиус геоида Я| 6371000 м
Максимальное значение модуля разности векторов скорости часов, расположенных на НКА и скорости часов, расположенных на поверхности геоида, измеренных в геоцентрической инерциальной системе отсчета V 4100 м с1
Гравитационная постоянная G 6,67385-10 » ч -2 -1 м3*с -кг
iНе можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
Масса геоида М 5,9736-10і4 кг
Скорость света с 299792458 м/с
Вторая зональная гармоника разложения гравитационного потенциала в ряд по сферическим функциям Ji 1,0826-10″*
Гравитационная потенциал на поверхности геоида Wo 6,2636856-10′ 2 -2 м~-с *
Согласно документу , погрешность передачи времени иТС(8и) на интервале 24 часа системой ГЛОНАСС должна быть не более ±700 не, т.е. относительное расхождение часов НКА и наземных часов должно быть не более 0,7-10’6 на интервале 24 часа. Поскольку поправки к шкале системного
времени ГЛОНАСС относительно UTC(SU) вычисляются в ПКУ ГЛОНАСС и один или два раза в сутки передаются на борт каждого НКА , то, то в середине интервала коррекции (через 6 часов) расхождение из-за релятивистских эффектов составит примерно {(6 х 60 х 60) с х 0,43 х 10 4 } = 9,3 мкс, а к концу интервала коррекции, соответственно, примерно 18,6 мкс. Расхождение часов НКА может накапливается с темпом примерно 1 мкс за 39 минут.
Следовательно, для обеспечения привязки шкалы системного времени ГЛОНАСС к шкале UTC(SU) с погрешностью не более ±700 не, коррекция часов НКА должна выполняться с интервалом не более 27 минут.
Литература
1. Современные проблемы частотно-временного обеспечения сетей электросвязи/Сборннк трудов международных научнотехнических конференций. — М .: ФГУП ЦНИИС, 2010.
2. Рыжков А.В.. Насонов А./О.. Новожилов Е.О., Колтунов М.Н.. Шварц М.Л. Концептуальные предложения по построению системы распределения сигналов единого точного времени в сети связи общего пользования Российской Федерации. Труды 11-й международной научно-практической конференции «Эволюция транспортных сетей, сети будущего, проблемы синхронизации и распределения времени», Украина, г. Ивано-Франковск, 23-25 мая 2012 г., С. 15-20.
3. Об исчислении времени. Федеральный закон Российской Федерации от 3 июня 2011 года № 107-ФЗ.
4. Радионавигационный план РФ. Утверждён приказом Мнн-промторга России от 02.09.2008 г. № 118.
5. Recommendation ITU-R TF.1011-1 Systems, techniques and services for time and frequency transfer.
6. Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ. Навигационный радиосигнал в диапазонах LI, L2 с открытым доступом и частотным разделением (редакция 5.1). — М.: РНИИ КП, 2008.
7. Recommendation ITU-R TF.2018 Relativistic time transfer in the vicinity of the Earth and in the solar system.
8. ГОСТ P 52867-5-2009 Глобальная навигационная спутниковая система. Параметры радионавигационного поля. Технические требования и методы испытаний.
Some problems of precise time synchronization of GLONASS signals
Filimonov S.N.
система
Система Систе́ма ( «целое, составленное из частей; соединение») — множество элементов, находящихся в отношениях и связях друг с другом, которое образует определённую целостность, единство. Потребность в использовании термина «система» возникает в тех случаях, когда нужно подчеркнуть, что «что-то» является большим, сложным, не полностью сразу понятным, при этом целым, единым.
система
ж.
1.Структура, представляющая собою единство закономерно расположенных и функционирующих частей.
2.Определенный порядок в расположении, связи и действии составляющих что-либо частей.
3.Форма общественного устройства; общественный строй, формация.
4.Форма организации чего-либо ( хозяйственных, государственных, политических единиц, учреждений и т.п. ) .
5.Совокупность учреждений, организационно объединенных в единое целое, или однородных по своим задачам организаций.
6.Совокупность принципов, служащих основанием какого-либо учения, мировоззрения. отт. Совокупность методов, приемов осуществления чего-либо.
7. разг.То, что стало обычным, регулярным.
система
1) главная сюжетная линия в журнале «Playboy»;
2) занятие системного администратора
система
( гр. systema (целое), составленное из частей, соединение)
1) множество закономерно связанных друг с другом элементов (предметов, явлений, взглядов, знаний и т д.), представляющее собой определенное целостное образование, единство,
2) порядок, обусловленный планомерным, правильным расположением частей в определенной связи, строгой последовательностью действий, напр. с. в работе; принятый, установившийся распорядок чего-л ,
3) форма, способ устройства, организации чего-л., напр государственная с , избирательная с.;
4) общественный строй, напр. социалистическая с.,
5) совокупность хозяйственных единиц, учреждений, родственных по своим задачам и организационно объединенных в единое целое;
6) совокупность тканей органов, их частей, представляющих собой определенное единство и связанных общей функцией, напр нервная с , сердечнососудистая с ,
7) техническое устройство, конструкция, напр оружие новой системы,
8) геол. горные породы, образовавшиеся в течение геологического периода; каждая с. подразделяется на геологические отделы и ярусы;
9) кристаллографическая с. — то же, что сингония ;
10) в метрологии — система единиц — совокупность основных и производных единиц физ. величин, позволяющая выразить результаты измерений в количественной форме; наиболее распространены метрические системы: международная система единиц (si, или си) и система сгс ( см. сгс ).
система
ж.
1) Структура, представляющая собою единство закономерно расположенных и функционирующих частей.
2) Определенный порядок в расположении, связи и действии составляющих что-л. частей.
3) Форма общественного устройства; общественный строй, формация.
4) Форма организации чего-л. (хозяйственных, государственных, политических единиц, учреждений и т.п.).
5) Совокупность учреждений, организационно объединенных в единое целое, или однородных по своим задачам организаций.
6) а) Совокупность принципов, служащих основанием какого-л. учения, мировоззрения. б) Совокупность методов, приемов осуществления чего-л.
7) разг. То, что стало обычным, регулярным.
система
жен. , греч. план, порядок расположенья частей целого, предначертанное устройство, ход чего-либо, в последовательном, связном порядке. Солнечная система, солнечная вселенная. Ботаническая система Линея, распределенье, распорядок. Система ученья, воспитанья, порядок, способ, образ, род. Систематичное, -ческое ученье, стройное, порядочное, порядливое, последовательное, разумное, правильное, обдуманное, постепенное. Систематика жен. научное разъясненье систем. Систематик, изобретатель новой системы или охотник до строгих, последовательных порядков.
система
, М., 1968; Холл А. Д., Фейджин Р. Е., Определение понятия системы, в сборнике: Исследования по общей теории систем, М., 1969; Месарович М., Теория систем и биология: точка зрения теоретика, в кн.: Системные исследования. Ежегодник. 1969, М., 1969; Малиновский А. А., Пути теоретической биологии, М., 1969; Рапопорт А., Различные подходы к общей теории систем, в кн.: Системные исследования. Ежегодник. 1969, М., 1969; Уемов А. И., Системы и системные исследования, в кн.: Проблемы методологии системного исследования, М., 1970; Шрейдер Ю. А., К определению системы, ‘Научно-техническая информация. Серия 2’, 1971, |7; Огурцов А. П., Этапы интерпретации системности знания, в кн.: Системные исследования. Ежегодник. 1974, М., 1974; Садовский В. Н., Основания общей теории систем, М., 1974; Урманцев Ю. А., Симметрия природы и природа симметрии, М., 1974; Bertalanffy L. von, An outline of general system theory, ‘British Journal for the Philosophy of Science’, 1950, v. I, | 2; Systems: research and design, ed. by D. P. Eckman, N. Y. — L., ; Zadeh L. A., Polak Е., System theory, N. Y., 1969; Trends in general systems theory, ed. by G. J. Klir, N. Y., 1972; Laszlo Е., Introduction to systems philosophy, N. Y., 1972; Unity through diversity, ed. by W. Gray and N. D. Rizzo, v. 1-2, N. Y.,
1973. См. также лит. при ст. Системный анализ , Системный подход .В. Н. Садовский.
система
система, -ы
система
множество элементов, находящихся в отношениях и связях друг с другом, которое образует определённую целостность, единство устойчивая закономерность стандартизованное техническое устройство трамвайный жаргон сцепка, работающая по системе многих единиц , отложения, образовавшиеся в течение геологической эры комплекс бытовой записывающий и воспроизводящей аппаратуры объединение, общность хиппи и примыкающих к ним молодёжных течений (в СССР и России)
Сегодня в своем блоге я публикую гостевую статью от компании «Jammer», в которой будет представлена информация об устройстве «Титан», которое применяется для того чтобы глушить спутниковые частоты Глонасс и GPS. Думаю, кому-то из читателей моего блога будет интересно познакомиться с технологиями, которые применяются для подавления сигналов треккеров.
Системы слежения за передвижением
Профессиональные компании по перевозке пассажиров или груза все чаще задействуют систему слежения за передвижением их автопарка, будь то автобус, легковой или грузовой автомобиль, устанавливается слежка по всему маршруту передвижения. Это вполне оправдано с точки зрения безопасности водителя, пассажира или сохранности груза, но в тоже время такое пристальное внимание нарушает личные границы и свободу передвижения водителя. Хотя для многих этот вопрос является спорным, но остается он неизменно насущным и очень актуальным.
По тем или иным причинам водители пытаются увернуться от назойливого слежения и ищут пути решения этого вопроса. К каким же методам они прибегают?
Самым распространенным и не особо умным способом обойти систему слежения транспортной компании является нарушение корректной работы навигационного устройства. На первый взгляд – этот метод выглядит вполне действенным и эффективным. Например, можно изъять сим-карту, поменять полярность питания или вообще его отключить, закоротить устройство, залив водой или просто повредить кабель.
Половина из этих действий, возможно, сработает, и слежения за ТС не будет, но их минусом является то, что все это – чистой воды порча имущества. Если руководство захочет, то вину водителя доказать будет не сложно и ему придется ответить за содеянное материально, заплатив из собственного кошелька. И, разумеется, доверия к водителю-нарушителю уже не будет. Может даже последовать увольнение. Следует заметить, что даже попытка прибегнуть к таким методам нейтрализации слежения вряд ли удастся, так как современные системы мониторинга сводят к минимуму всевозможные механические воздействия, сразу же после установки на ТС.
Другой способ избежать слежения – это заглушить сигнал треккера. Здесь стоит учитывать тот факт, что системы слежения последнего поколения достаточно развитые и мощные, их сигнал не так просто подавить.
Каждая транспортная компания сама в праве решать, какой вид треккера использовать, но серьезные перевозчики закупают качественное оборудования, так как стандарты их работы и риски высоки. Сигналы мощных треккеров чаще всего сложно заглушить дешевыми ширпотребными приборами, позиционирующие себя, как универсальные и подходящие всем глушители. Дорогие и качественные глушилки, такие же мощные, как и сам треккер, конечно, справятся с задачей, вот только цена бывает не всегда радует водителя, но, исходя из отзывов, она того стоит.
Можно прибегнуть к знаниям IT-технологий и заранее записать выдуманный маршрут на треккер. Но и такой метод не особо доступен. Ведь здесь нужны специальные знания и навыки, которыми простой водитель обычно не обладает.
Итак, что же делать, если слежку с выше все-таки необходимо исключить?
Из всех вариантов наиболее подходящим будет заглушить сигнал. Вопрос только, чем именно стоит это делать, какой именно прибор лучше – чтобы за разумные деньги получить достойное и эффективное устройство. Выход есть и заключается он в одном универсальном подавителе Титан, которое 100-процентно успешно глушит спутниковые частоты Глонасс и GPS.
Портативный прибор Титан уникален тем, что он является мощным подавителем, радиус работы которого позволяет охватить весь автобус, грузовик или фуру и может без перерыва работать от прикуривателя и сети 220В, а так же с помощью встроенного аккумулятора в пределах 2 часов.
Он эффективно глушит все частоты GPS и Глонасс, а так же GSM, 3G и 4G. В частности для глушения Глонасс в диапазоне L1 рабочая частота составляет 1575,42 МГц, она совпадает с сигналами GPS-диапазона L1 и сигналом E1 таких систем как Галилео и Компас. Глушит L2-диапазон, используемая частота — 1242 МГц для Глонасс и GPS устройств. GSM частоты не менее важны, так как в современных треккерах, помимо GPS передатчика информации, задействована отправка сигнала через GSM сети.
Титан относиться к одним из лучших глушителей, которые эффективно справляются с частотами GPS и Глонасс. Данное устройство можно приобрести с доставкой. Цена на прибор абсолютно оправдана и она соразмерна тем выгодам, которые можно получить, используя данный прибор.
Всего хорошего!
Приглашаю всех подписаться на новости моей публичной страницы ВКонтакте, ее адрес http://vk.com/itmultimedia . Буду рад видеть Вас в своих подписчиках!






{kind=link}
{kind=link}
{kind=link}